

手 机:13925522295
邮 箱:dgsirui1688@163.com
电 话:0769-8997 7134
网 址:www.siruisj.com
地 址:广东省东莞市虎门镇路东新安路50号1栋302室

速 度 : 1.0s/次
设备尺寸 : 柔性供料器
快速切换 : 柔性供料器
精 度 : 精度±0.08mm
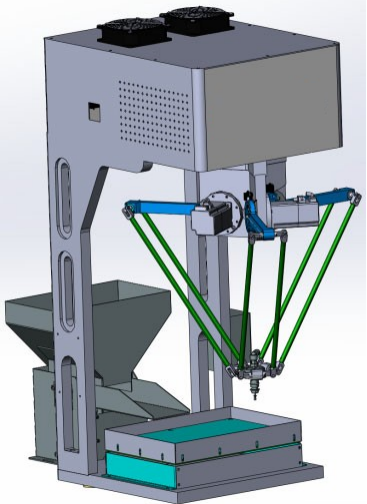
并联机器手臂
蜘蛛手机器手臂,是一种高精度、高速度机器人,被广泛 应用于工业自动化领域。相较于其他机器人,Delta机器人更 适合进行高精度、高重复性的操作,如电子元器件生产、医疗 器械组装等。其主要特点是构造简单、运动速度快、精度高, 同时具有高度稳定性和可靠性。
工业镜头拍照
专业用于工业图像采集的镜头,可以为机器手臂提供更加精准的视觉引导,使其能够更好地识别和拾取各种形状复杂的零件。
零件准确定位识别
视觉CCD识别特征数据,识别出其几何特征和材料属性,从 而实现对零件的准确识别和分类。同时,该传感器能够快速、准确地检测零件的位置、姿态、尺寸等参数,为机器人的精准拾取和加工提供基础数据支持。
可编程机器操作软件
操作员可以对机器人进行编程,而不需要专业的机器人技能 和专业编程知识。通过该软件,用户可以利用简单的图形化界面 来设计构建机器人的自动化任务,包括机器人的移动路径、传感 器监测和响应等,无需使用编程语言进行编写。 相比于传统机器人编程软件,可编程机器人软件界面更加简单易用,用户只需要使用简单的编辑和连接操作即可完成机器 人任务编程。
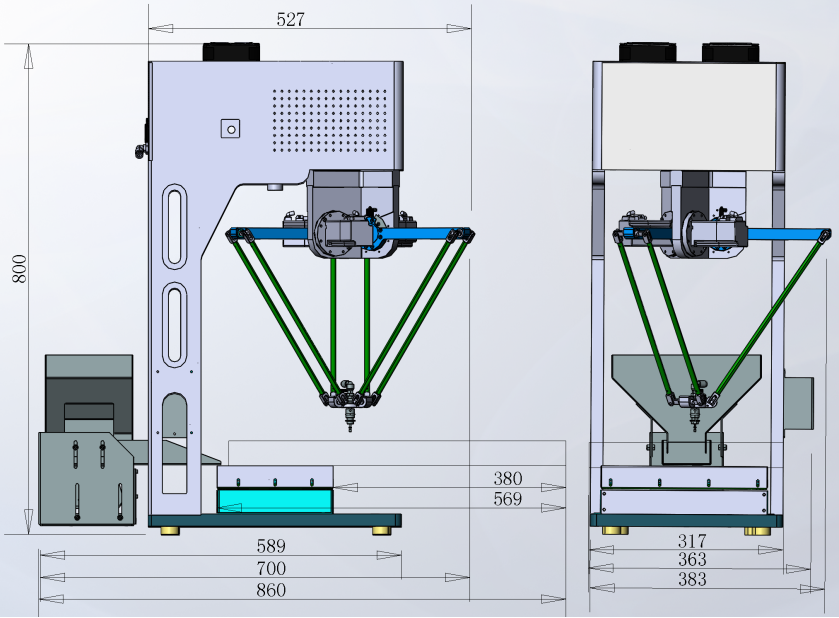
尺寸图:

| 参数表格 | |
| 型号 | SR-BL550 |
| 电压 | AC220V |
| 功率 | 450W |
| 尺寸 | 700*383*800 |
| 重量 | 35KG |
| 运行范围 | 直径:550mm 提升高度:55mm |
| 摆盘范围 | 260*370 |
| 速度 | 1.0秒/次 |
| 重复精度 | ±0.20mm |
| 电压 | AC220V |
| 驱动方式 | 伺服电机 |
| 光源 | 矩形白光 |
| 震动方式 | 音圈震动电机 |
| 相机分辨率 | 4024*3036 |
| 输入气源 | 0.4-0.6MPa |
| 输出气压 | -90-300KPa |
| 供气管径 | 6mm |



